
行业专用智能穿戴产品定制专家
定制与服务电话:
13689582890


13689582890
随着移动通信技术的应用和发展 ,人们对信息服务的即时性和就地性表现出越来越迫切的需求 ,所以 3 GPP 已将定位服务作为第三代移动应用解决方案的必须支持的业务之一 。
目前 ,无线定位的方法主要有以下几种 :
(1) 全球定位系统 ( GPS) : GPS 接收机至少需要 4 颗卫星才能确定移动台的位置 ,而且在室内和高密度市区不能使用。
(2) 场强定位法 :场强定位最简单 ,但信号场强受外界因素影响大 ,定位精度较差;
(3) 到达角度 (AOA) 定位法 : AOA 定位法虽有一定精度 ,但接收端需要安装天线阵列 ,设备较复杂 ;
(4) 到达时间 ( TOA) 定位法 : TOA 定位法精度较高 ,对现有网络改动小且造价低 ,但对移动台和基站之间的同步有较高要求 ;
(5) 到达时间差 ( TDOA) 定位法 : TDOA 定位法利用测量信号到达不同接收机的时间差 ,所以不要求移动台和基站之间精确的时间同步 ,可以降低成本并仍保证一定的定
位精度 。
总之 ,仅仅利用上述定位方法中的任何一种都很难满足 FCC 定位要求。于是 ,本文中提出一种基于多传感器数据融合 (data f usio n) 将 TOA 和 TDOA 几种定位方式相结合的组合定位方法 。
数据融合的基本思想是将来自不同传感器的数据合并 ,利用各自的冗余信息相互补充从而实现对观测对象更好的理解和认识 。数据融合技术已经广泛应用于自动目标识别 、战场监视 、自动飞行器导航与控制 、工业过程控制 、遥感 、医疗诊断 、图像处理 、模式识别等领域 。目前 ,普遍为学者们所接受的是 3 层融合层次结构 ,即数据层 、特征层和决策层 。譬如 , Kleine2Ost mann 和 Bell 在此基础上针对无线定位问题提出一个包含一 、二 、四级数据融合模型 。在一个系统中不仅仅可以实现三种基本的数据融合: 数据层融合 、特征层融合、决策层融合 ,也可以同时在不同的融合层次上进行融合 。
理论与方法
1. 一种 TOA/ TDOA 数据融合模型及动态位置估计算法
TOA/ TDOA 数据融合模型
K2B模型的数据来源主要是相互独立的TOA和TDOA测量数据 ,但是在实际的宏蜂窝网络中 ,功率控制策略使移动台的发射功率受到限制 ,这就使得当移动台在服务小区中处于某些位置时 ,除了服务基站外 ,其余辅助测量基站难以有效检测 TOA 信息 ,不能满足 3 个基站同时检测 TOA 信息的基本要求 ,从而造成传统的多边 L S 定位算法有时不能对移动台进行有效定位 。为此 ,利用移动台所在的扇区信息来消除只能测得 2 个 TOA 时产生的模糊问题 ,这种方法能以 2/ 3 以上的概率消除位置模糊现象 。
但是当测量基站过多时 ,会显著增加网络的信令负荷 ,而且传统的 L S 算法在实际应用中通常面临如何确定各基站测量值可靠性对应的权重 ,以及造成 L S 算法慢收敛的移动台初始位置等问题[ 2 ] 。基于以上原因 ,本文考虑用一种基于移动台位置的动态定位算法实现位置估计算法 ,如图所示:
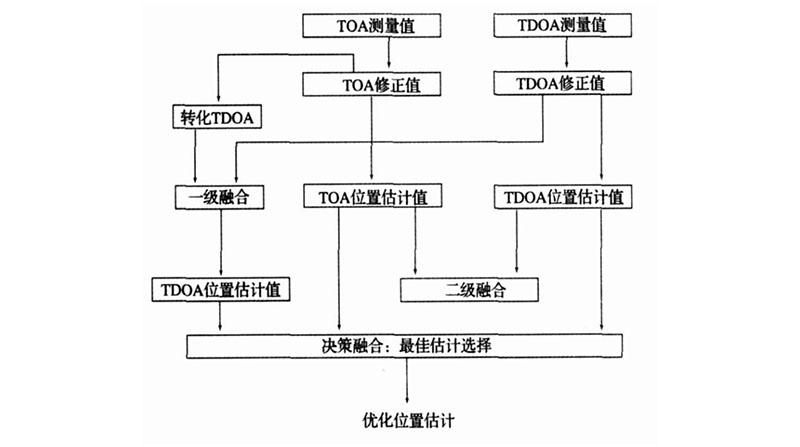
该算法可以从 4 种不同的途径实现移动台的位置估计 。第 1 种途径是将 TOA 数据作为动态位置估计器的输入 ,第 2 种途径是将 TDOA 数据作为动态位置估计器的输入 ,其他 2 种途径是分别将一级和二级融合结果作为输入得到移动台位置估计 。
动态位置估计算法
由于各个测量基站与移动台之间的传播环境不一样 ,假设αi 为表征第 i 个基站测量数据的可靠性 。在实际无线信道中 ,均方时延扩展τrms 随MS与基站之间距离的增大而增大 ,导致MS与基站之间的距离越远, 基站检测的TOA数据出现较大误差的概率也越大 ,即其可靠性也较差。在对定位信号进行时序采样测量的前提下 ,同一个基站对 MS 所测得 TOA 测量值的方差一定程度上也反映了TOA 测量数据的可靠性, 方差越大说明 TOA 测量值的可靠性就越差。于是 ,根据无线电波传播特性得出的独立观测数据最佳线性融合结论 ,定义测量基站 i 的可信度函数 :
αi = 1/ ( diεδ i 2 )
式中 , di 为MS和第 i 个基站之间的估计距离 ,ε是一信道
参数 ,在典型的移动通信信道中通常取 0. 5 。
TOA 位置估计算法
TOA 动态位置估计算法思想是移动台在蜂窝小区中的不同位置需要不同数目的邻近基站分别提供有效的测量数据 。上述可信度函数式 ( 1) 的定义使得适用于 TOA 定位的传统 L S 算法将随着 MS 的位置动态改变[ 3 ] 。L S 算法在递归寻优过程中 ,通常要假设一个移动台的初始位置 ,初始位置的选取很可能影响到算法的收敛速度 ,进而影响到定位系统的响应时间 。所以本文采取以下处理策略进行初始位置的选取 :
(1) 只有一个 TOA 值时 ,结合所在扇区信息得到移动台的初始位置 。如以所在扇区的角平分线方向上距离为 di的点作为 L S 算法的初始位置 。
(2) 只有两个 TOA 值 ,结合所在扇区信息 ,如果不存在位置模糊问题 ,则将估计位置作为 L S 算法的初始位置 ;否则 ,我们用两个估计位置的中点作为LS算法的初 始位置 。
(3) 如果蜂窝网络中能提供3个以上 TOA 数据 ,结合所在扇区信息 ,以任意两个不存在模糊问题 TOA 值 ,确定算法的初始位置 ,利用 L S 算法计算出 MS 的估计位置。
基于移动台位置的 TOA 动态定位算法描述如下 :
(1) 在时序采样测量的前提下 ,按照文献 [ 4 ] 方法鉴别NL OS 并修正 TOA/ TDOA 测量值 ;
(2) 根据蜂窝网络中提供的 TOA 数据个数 ,确定移动台的初始位置 ;
(3) 根据 MS 初始位置 ,在泰勒级数算法中参与位置估计的 TOA 数目需根据 MS 服务基站之间的估计距离动态调节 。假定蜂窝小区半径为 R , 与服务基站之间的初始估计距离为 d 。
如果 d < 1/ 3 R ,使用全部 TOA 数据 ;如果 1/ 3 R < d < 2/ 3 R ,则使用 6 个估计距离较近的 TOA 数据 ,不足 6 个则使用全部 ; 如果 2/ 3 R < d < R , 使用 5 个估计距离较近的TOA 数据 ,不足则使用全部 。
TDOA 位置估计
尽管上述泰勒级数算法能提供准确的结果 ,但是一旦移动台的初始位置离实际位置较远时 ,可能会出现算法不收敛的情况 。另外 ,由于泰勒级数展开是利用二阶以上项线性化方程得到, 这会产生较大的定位误差。最适合TDOA定位的Chan算法很好的解决了以上问题

式中 , Ki = X i 2 + Y i 2 , i = 1 , 2 , 3 R j , 1 = c dj , 1 , j = 2 , 3
(1) 根据测量基站的可信度函数选择 3 个可信度高的TDOA 测量值 ;
(2) 利用类似上述 TOA 定位中先确定初始位置 ,计算式右边 R1 的值 ;
(3) 用 Chan 算法计算移动台的位置目标 。
2. 各级融合的实现过程
一级融合
一级融合就是由 TOA 转化得到的 TDOA 和测量得到的 TDOA 实现数据层融合 。在一级数据融合过程中首先将各个辅助基站测得的 TOA 值与服务基站测得的 TOA值相减 ,从而转换成 TDOA 值 。这些转化后的 TDOA 值与其对应的互相关测量得到的 TDOA 值以可信度为权重进行最佳线性数据融合 , 最后得到的一个 TDOA 序 列集合 ,并利用动态 TDOA 位置估计算法求解 。
二级融合
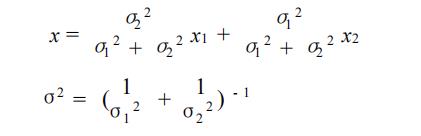
二级融合是 将 两 路 独 立 的 TOA 位 置 估 计 器 输 出 和TDOA 位置估计器输出进行数据层融合 。假设 TOA 估计器的输出值均值为 x1 ,方差为σ1 2 , TDOA 估计器的输出值均值为 x2 ,方差为 σ 2 2 ,这两路数据合并后的数据均值为x ,方差为σ2 。对 TOA 估计器和 TDOA 估计器两路独立输出结果进行最佳线性数据融合 ,融合结果的方差将不大于其中任何一种分量估计器的输出方差 。二级融合的结果均值和方差分别表示如下 :
决策融合
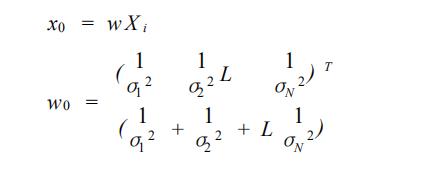
四级融合(决策融合) 的任务是在各个位置估计器的输出 ,先验基站几何布局和 TOA/ TDOA 测量修正值已知的 基础上 ,决策得到一个最合适的位置估计。一般来说 ,抉择 标准应遵循位置估计器输出的方差越小 ,估计结果的可靠 性也就越大。按照最佳线性数据融合 ,决策输出表示成各 个位置估计的线性组合 ,其决策方差不大于任何单个估计 器的输出方差。w 为最佳线性决策融合的加权系数向量 , Xi 是各个分量估计器的输出组成的向量 :
3. 仿真结果
在典型的 7 小区/ 簇的蜂窝系统 (7 基站正六边形蜂窝 网络)中 ,假设小区半径 3 000 m ,服务基站 (0 ,0) ,且存在 NLOS 的情况下我们对该算法融合模型的性能进行了仿 真。假定对于 MS 的一次定位请求可以测量 200 组 TDOA 测量值 ,然后分别按 TOA 和 TDOA 序列展开法进行定位 估计 ,再进行数据融合产生 4 种位置估计值。最后在第四 级融合时从 4 种不同的定位估计值中选择 MS 的优化位置 估计 ,综合考虑了均方根误差 ( RMSE) 、距离偏差等多项 指标 。
为了检验几何精度冈子 ( GDOP) 对定位性能的影响 , 分别对 BS 位于蜂窝小区内与服务 BS 具有不同距离的 3 个位置时模型的定位性能进行了仿真研究。如表 1 和 2 所示。
从仿真结果可以看出 ,数据融合决策输出的方差不大 于融合前任何单个估计器的输出方差 ,有效提高了系统可 靠性 ,并保证了良好的定位精度。(注 : R 为小区半径)
蜂窝网络定位技术主要由两个方面组成 :测量与计算。 在消除多种干扰准确测量 TDOA 的前提下 ,如何进行准确计算移动台的位置是本文研究的重点。

关注微信公众号
